 |
|
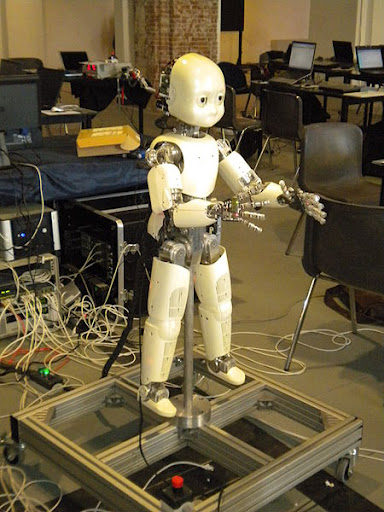
| An iCub robot mounted on a supporting frame. The robot is 104 cm high and weighs around 22 kg |
An iCub is a 1 metre high humanoid robot testbed for research into human cognition and artificial intelligence.
Systems that perceive, understand and act |
It was designed by the RobotCub Consortium, of several European universities and is now supported by other projects such as ITALK.[1] The robot is open-source, with the hardware design, software and documentation all released under the GPL license. The name is a partial acronym, cub standing for Cognitive Universal Body.[2] Initial funding for the project was €8.5 million from Unit E5 – Cognitive Systems and Robotics – of the European Commission‘s Seventh Framework Programme, and this ran for six years from 1 September 2004 until 1 September 2010.[2]
The motivation behind the strongly humanoid design is the embodied cognition hypothesis, that human-like manipulation plays a vital role in the development of human cognition. A baby learns many cognitive skills by interacting with its environment and other humans using its limbs and senses, and consequently its internal model of the world is largely determined by the form of the human body. The robot was designed to test this hypothesis by allowing cognitive learning scenarios to be acted out by an accurate reproduction of the perceptual system and articulation of a small child so that it could interact with the world in the same way that such a child does.[3]
See Also: RoboCub

In philosophy, the embodied mind thesis holds that the nature of the human mind is largely determined by the form of the human body. Philosophers, psychologists, cognitive scientists and artificial intelligence researchers who study embodied cognition and the embodied mind argue that all aspects of cognition are shaped by aspects of the body. The aspects of cognition include high level mental constructs (such as concepts and categories) and human performance on various cognitive tasks (such as reasoning or judgement). The aspects of the body include the motor system, the perceptual system, the body’s interactions with the environment (situatedness) and the ontological assumptions about the world that are built into the body and the brain.
The embodied mind thesis is opposed to other theories of cognition such as cognitivism, computationalism and Cartesian dualism.[1] The idea has roots in Kant and 20th century continental philosophy (such as Merleau-Ponty). The modern version depends on insights drawn from recent research in psychology, linguistics, cognitive science, artificial intelligence, robotics and neurobiology.
Embodied cognition is a topic of research in social and cognitive psychology, covering issues such as social interaction and decision-making.[2] Embodied cognition reflects the argument that the motor system influences our cognition, just as the mind influences bodily actions. For example, when participants hold a pencil in their teeth engaging the muscles of a smile, they comprehend pleasant sentences faster than unpleasant ones.[3] And it works in reverse: holding a pencil in their teeth to engage the muscles of a frown increases the time it takes to comprehend pleasant sentences.[3]
George Lakoff (a cognitive scientist and linguist) and his collaborators (including Mark Johnson, Mark Turner, and Rafael E. Núñez) have written a series of books promoting and expanding the thesis based on discoveries in cognitive science, such as conceptual metaphor and image schema.[4]
Robotics researchers such as Rodney Brooks, Hans Moravec and Rolf Pfeifer have argued that true artificial intelligence can only be achieved by machines that have sensory and motor skills and are connected to the world through a body.[5] The insights of these robotics researchers have in turn inspired philosophers like Andy Clark and Horst Hendriks-Jansen.[6]
Neuroscientists Gerald Edelman, António Damásio and others have outlined the connection between the body, individual structures in the brain and aspects of the mind such as consciousness, emotion, self-awareness and will.[7] Biology has also inspired Gregory Bateson, Humberto Maturana, Francisco Varela, Eleanor Rosch and Evan Thompson to develop a closely related version of the idea, which they call enactivism.[8] The motor theory of speech perception proposed by Alvin Liberman and colleagues at the Haskins Laboratories argues that the identification of words is embodied in perception of the bodily movements by which spoken words are made.[9][10][11][12][13]

The mind-body problem is a philosophical problem arising in the fields of metaphysics and philosophy of mind.[2] The problem arises because mental phenomena arguably differ, qualitatively or substantially, from the physical body on which they apparently depend. There are a few major theories on the resolution of the problem. Dualism is the theory that the mind and body are two distinct substances,[2] and monism is the theory that they are, in reality, just one substance. Monist materialists (also called physicalists) take the view that they are both matter, and monist idealists take the view that they are both in the mind. Neutral monists take the view that both are reducible to a third, neutral substance.
The problem was identified by René Descartes in the sense known by the modern Western world, although the issue was also addressed by pre-Aristotelian philosophers,[3] in Avicennian philosophy,[4] and in earlier Asian traditions.
A dualist view of reality may lead one to consider the corporeal as little valued[3] and trivial. The rejection of the mind–body dichotomy is found in French Structuralism, and is a position that generally characterized post-war French philosophy.[5] The absence of an empirically identifiable meeting point between the non-physical mind and its physical extension has proven problematic to dualism and many modern philosophers of mind maintain that the mind is not something separate from the body.[6] These approaches have been particularly influential in the sciences, particularly in the fields of sociobiology, computer science, evolutionary psychology and the various neurosciences.[7][8][9][10]

The real problem with this is that emotions guide cognition. And how make the robot emotional? We don't even know what an emotion or quale is in physical terms, only that it is strongly correlated with molecules.Interesting.
Hi Ulla,The real problem with this is that emotions guide cognition.I think that is a good point. How can you make technology intuitive?And how make the robot emotional?Exactly.
Hi Ulla,The real problem with this is that emotions guide cognition.I think that is a good point. How can you make technology intuitive?And how make the robot emotional?Exactly.
Below are some of my thoughts about emotion, I designed the idea of "Colour of gravity" to appeal to the nature of emotion constraining our development in perception by the evaluation of where such emotions are defined within the spectrum of gravitational inclinations? The intellectual is a defining part of our evolution too you see just as much as emotion is. So it behooves us to ask what is the road to intelligence…..the EQ(emotional quot-ion) or the IQ( intellectual quot-ion). Learning about the environs one can place them self in consciousness is not an easy thing to learn, as emotion itself can lure even the best intellectual mind off course of a defined purpose.Emotion can define and restrict our views of a wider perception of the world/LCS because it contains us to the experience. If one could see itself in consciousness as a "whole observing being" then what keeps it unattached to the environs while one goes searching? That is part of the liberation training….is to be able to identify those things that keep us attached to our life experience in the making? A feather and a heart on a scale is a subtle thing to be aware of? The life review is an informational package that we can move fast through in sizing up our life? So what regrets does one have and what choices will set the trail for an new adventure in the souls journey?
Below are some of my thoughts about emotion, I designed the idea of \”Colour of gravity\” to appeal to the nature of emotion constraining our development in perception by the evaluation of where such emotions are defined within the spectrum of gravitational inclinations? The intellectual is a defining part of our evolution too you see just as much as emotion is. So it behooves us to ask what is the road to intelligence…..the EQ(emotional quot-ion) or the IQ( intellectual quot-ion). Learning about the environs one can place them self in consciousness is not an easy thing to learn, as emotion itself can lure even the best intellectual mind off course of a defined purpose.Emotion can define and restrict our views of a wider perception of the world/LCS because it contains us to the experience. If one could see itself in consciousness as a \”whole observing being\” then what keeps it unattached to the environs while one goes searching? That is part of the liberation training….is to be able to identify those things that keep us attached to our life experience in the making? A feather and a heart on a scale is a subtle thing to be aware of? The life review is an informational package that we can move fast through in sizing up our life? So what regrets does one have and what choices will set the trail for an new adventure in the souls journey?
Emotions act as a kind of label, or light, that shows which alternative you should choose. I think it is behind ethics, which is inherent to a part. You can also call it free will?In this way the talk of intelligence is illusionary. The real intelligence is emotional? This has been shown so clearly by Damasio.Emotions can then be of many kinds, but primarily (Piaget) they are just two, love and fear, positive or enlargening or negative, constraining, compressing. So, basically emotions is about amplifying or reducing energy? Interpreted as entropy? If you have many fears or constraining emotions, also the decisions you are making are distorted?If we take the virtual well and bombard it with energy we can make high waves, and eventually see a particle. If we bombard the free will well the same thing happen. Amplifying is better? Also conflicting emotions that much distort can create high waves, but usually they are not the common ones, but as we say, creative ones :)Love is holographic? Like light? Fear is very compressed? Think of how a panic attack works.How build this into a robot? You need two kinds of very different equations, or math types, for the light and the well. Matti has suggested p-adics as one (the light?), guided by primes. The 'steps' in his model bothers me. Too steep?
"If one could see itself in consciousness as a "whole observing being" then what keeps it unattached to the environs while one goes searching?"I think this is the basic wrong interpretation we usually make. Life is governed by HOMEOSTASIS. Think what it means. Life is also an open thermodynamic system, so "unattatched by environs" means we are dead.How make robots as open systems? What are then the controlling signals?
Harmonies or modulations of the p-adics could work?
http://www.scottaaronson.com/blog/?p=1052If a computer, or robot, was able to achieve true Artificial Intelligence, but it did not have a parallel programming or capacity for empathy, would that then necessarily make the computer psychopathic? And if so, would it then follow the rule devised by forensic psychologists that it would necessarily then become predatory?
Hi Ulla,If a computer, or robot, was able to achieve true Artificial Intelligence, but it did not have a parallel programming or capacity for empathy, would that then necessarily make the computer psychopathic? And if so, would it then follow the rule devised by forensic psychologists that it would necessarily then become predatory? I mean that is an interesting perspective that I share in regard to what diagnosis would have you believe that inherent in the psychopathy such development is indeed predatory?
Hi Ulla,If a computer, or robot, was able to achieve true Artificial Intelligence, but it did not have a parallel programming or capacity for empathy, would that then necessarily make the computer psychopathic? And if so, would it then follow the rule devised by forensic psychologists that it would necessarily then become predatory? I mean that is an interesting perspective that I share in regard to what diagnosis would have you believe that inherent in the psychopathy such development is indeed predatory?
PlatoHagel:"If one could see itself in consciousness as a "whole observing being" then what keeps it unattached to the environs while one goes searching?"Ulla:Life is also an open thermodynamic system, so "unattatched by environs" means we are dead.So if I give you two aspects in relation too, PMR(Physical Matter Reality) or NPMR (Non Physical Matter Reality) how would you then perceive my statement?Meaning, that our reality can be divide up in such a way that we could do both?
PlatoHagel:\”If one could see itself in consciousness as a \”whole observing being\” then what keeps it unattached to the environs while one goes searching?\”Ulla:Life is also an open thermodynamic system, so \”unattatched by environs\” means we are dead.So if I give you two aspects in relation too, PMR(Physical Matter Reality) or NPMR (Non Physical Matter Reality) how would you then perceive my statement?Meaning, that our reality can be divide up in such a way that we could do both?
Non-physical versus physical? It seems nonsensical to me. What is then the non.physical? Emotions are very physical.
Hi Ulla,Substance dualismSubstance dualism is a type of dualism most famously defended by Descartes, which states that there are two fundamental kinds of substance: mental and material.[6] According to his philosophy, which is specifically called Cartesian dualism, the mental does not have extension in space, and the material cannot think. Substance dualism is important historically for having given rise to much thought regarding the famous mind–body problem. Substance dualism is a philosophical position compatible with most theologies which claim that immortal souls occupy an independent "realm" of existence distinct from that of the physical world.[1] David Chalmers recently developed a thought experiment inspired by the movie The Matrix in which substance dualism could be true: Consider a computer simulation in which the bodies of the creatures are controlled by their minds and the minds remain strictly external to the simulation. The creatures can do all the science they want in the world, but they will never be able to figure out where their minds are, for they do not exist in their observable universe. This is a case of substance dualism with respect to computer simulation. This naturally differs from a computer simulation in which the minds are part of the simulation. In such a case, substance monism would be true.[8]Best,
Hi Ulla,Substance dualismSubstance dualism is a type of dualism most famously defended by Descartes, which states that there are two fundamental kinds of substance: mental and material.[6] According to his philosophy, which is specifically called Cartesian dualism, the mental does not have extension in space, and the material cannot think. Substance dualism is important historically for having given rise to much thought regarding the famous mind–body problem. Substance dualism is a philosophical position compatible with most theologies which claim that immortal souls occupy an independent \”realm\” of existence distinct from that of the physical world.[1] David Chalmers recently developed a thought experiment inspired by the movie The Matrix in which substance dualism could be true: Consider a computer simulation in which the bodies of the creatures are controlled by their minds and the minds remain strictly external to the simulation. The creatures can do all the science they want in the world, but they will never be able to figure out where their minds are, for they do not exist in their observable universe. This is a case of substance dualism with respect to computer simulation. This naturally differs from a computer simulation in which the minds are part of the simulation. In such a case, substance monism would be true.[8]Best,