WASHINGTON — NASA has demonstrated robotic fluid transfer in space, an objective that will help inform the development of robotic technology to refuel satellites. The first-of-its-kind demonstration was performed during the Robotic Refueling Mission (RRM) aboard the International Space Station.
“This achievement is a major step forward in servicing satellites,” said Frank Cepollina, associate director of the Satellite Servicing Capabilities Office at NASA’s Goddard Space Flight Center in Greenbelt, Md. “RRM gives NASA and the emerging commercial satellite servicing industry the confidence to robotically refuel, repair and maintain satellites in both near and distant orbits — well beyond the reach of where humans can go today.”
A joint effort with the Canadian Space Agency, RRM uses the International Space Station as test bed for the research and development of robotic satellite-servicing capabilities. During six days of activity last month, controllers on the ground at NASA’s Johnson Space Center in Houston used the space station’s remotely operated Dextre, a robotic space handyman, to cut wires, remove and stow caps and perform tasks necessary to refuel satellites not designed to be refueled.
The cutting-edge technologies that RRM is demonstrating could extend the lives of many of the hundreds of satellites currently in geosynchronous Earth orbit. These are satellites that deliver essential services such as weather reports, cell phone communications, television broadcasts, government communications and air traffic management.
RRM tasks scheduled to be performed later this year include thermal blanket cutting and fastener and electronic termination cap removals. NASA anticipates RRM technologies may help boost the commercial satellite-servicing industry in the future. Such servicing capabilities could greatly expand options for government and commercial fleet operators. See:NASA’S Refueling Demonstration Proves Viability Of Satellite-Servicing Technologies

 |
|||
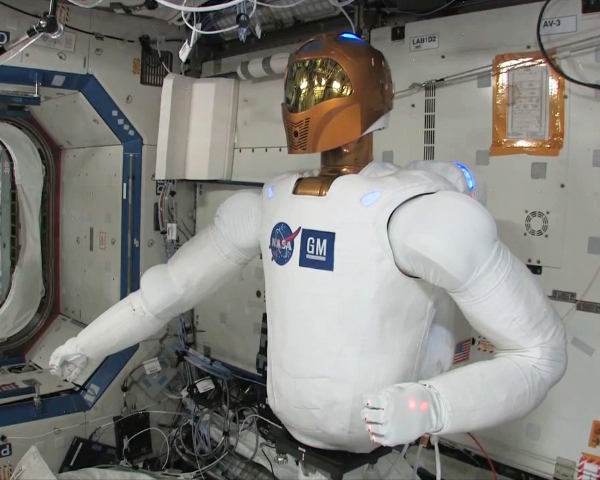
| The first movement of Robonaut 2 on the International Space Station during one of the initial checkout tests with Astronaut Mike Fossum |
In February 2010, Robonaut 2 (R2) was revealed to the public. R2 is capable of speeds more than four times faster than R1, is more compact, more dexterous, and includes a deeper and wider range of sensing.[11] It can move its arms up to 2 m/s, has a 40 lb payload capacity and its hands have a grasping force of roughly 5 lbs. per finger. There are over 350 sensors and 38 PowerPC processors in the robot.[12]
Station crew members will be able to operate R2, as will controllers on the ground; both will do so using telepresence. One of the improvements over the previous Robonaut generation is that R2 doesn’t need constant supervision. In anticipation of a future destination in which distance and time delays would make continuous management problematic, R2 was designed to be set to tasks and then carry them through autonomously with periodic status checks.[10] While not all human range of motion and sensitivity has been duplicated, the robot’s hand has 12 degrees of freedom as well as 2 degrees of freedom in wrist.[13][14] The R2 model also uses touch sensors at the tips of its fingers.[15]R2 was designed as a prototype to be used on Earth but mission managers were impressed by R2 and chose to send it to the ISS.[10] Various upgrades were made to qualify it for use inside the station. The outer skin materials were exchanged to meet the station’s flammability requirements, shielding was added to reduce electromagnetic interference, processors were upgraded to increase the robot’s radiation tolerance, the original fans were replaced with quieter ones to accommodate the station’s noise requirements, and the power system was rewired to run on the station’s direct current system rather than the alternating current used on the ground.[10]
Robonaut 2 was launched on STS-133 on February 24, 2011, and delivered to the ISS. On August 22, R2 was powered up for the first time while in low earth orbit.[16] This was called a “power soak” which is a power system test only with no movement. On October 13, R2 moves for the first time while in space.[17] The conditions aboard the space station provide a proving ground for robots to work shoulder to shoulder with people in microgravity. Once this has been demonstrated inside the station, software upgrades and lower bodies may be added, allowing R2 to move around the interior of the station and perform maintenance tasks, such as vacuuming or cleaning filters.[10] Climbing legs and a battery backpack are planned to be delivered to the ISS in late 2013.[18]
Further upgrades could be added to allow R2 to work outside in the vacuum of space, where R2 could help space walkers perform repairs, make additions to the station or conduct scientific experiments. There are no plans to return the launched R2 back to earth.[10]
NASA’s experience with R2 on the station will help them understand its capabilities for possible deep space missions.
See Also: